时间戳转换
时间戳转换 JSON格式化
JSON格式化 颜色转换
颜色转换 进制转换
进制转换 接口调试
接口调试 Base64转换
Base64转换 md5加密
md5加密 TypeScript在线练习
TypeScript在线练习 地图坐标拾取
地图坐标拾取 SVG在线绘制
SVG在线绘制 流程图在线绘制
流程图在线绘制 unicode转换
unicode转换 繁体字转换
繁体字转换 度分秒 转 经纬度
度分秒 转 经纬度 意见反馈
意见反馈 匿名留言
匿名留言 毒鸡汤
毒鸡汤 彩虹屁
彩虹屁 朋友圈心情文案
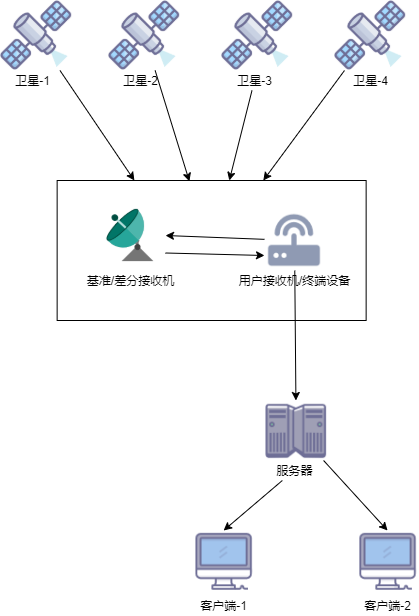
朋友圈心情文案DGPS(Differential GPS),是一种应用于GPS系统中以提高民用定位精度的技术。当然这个定义也可以推广到其他GNSS系统中。
其原理是在位置已精确测定的已知点上配一台GPS接收机作为基准站,和用户(移动站)同步进行GPS观测,将得到的单点定位的结果与基准站坐标比较,求解出实时差分修正值。
根据差分基站发送的信息方式可以将差分GPS分为三类:
位置差分
即通过基准站位置的误差来修正,这是最简单的一种,任何一种GPS接收机均可改装和组成这种差分系统,基站将定位的坐标与已知坐标的误差发送出去由用户接收并修正。这种差分的先决条件是基准站和用户站观测同一组卫星,适合用户在基站100km之内的情况。位置差分并不常用。
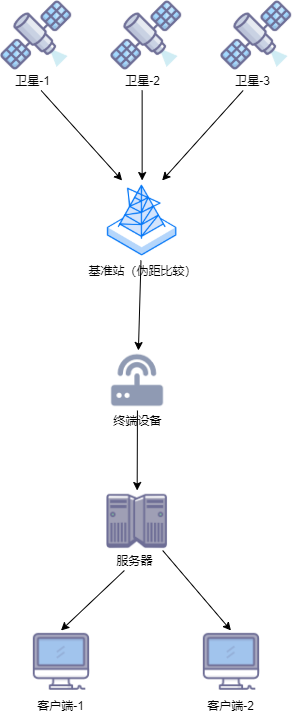
伪距差分
即通过基准站到各个卫星的误差来修正。这是应用最广的一种差分,在基准站上,观测所有卫星,根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。再与测得的伪距比较,得出伪距改正数,将其传输至用户接收机,提高定位精度。这种差分,能得到米级的定位精度。
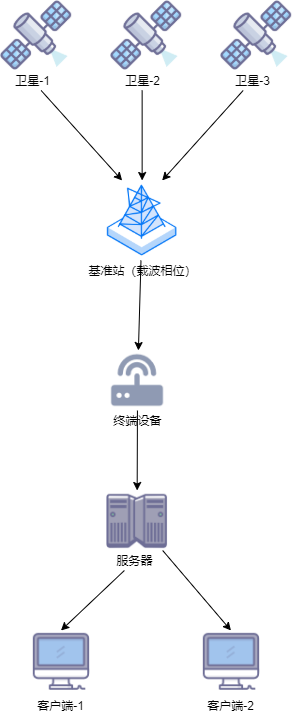
相位差分
实时动态载波相位技术,又称RTK(Real-time Kinematic),是实时处理两个测站载波相位观测量的差分方法。即是将基准站采集的载波相位发给用户接收机,进行求差解算坐标。由于载波的精度远高于其内容(C/A码速率是1.023MHz,一个码的长度为977.5ns,即293米,而载波的速率是1575.42MHz,一个载波的长度是635ps,即19厘米),载波相位差分可使定位精度达到厘米级甚至毫米级。大量应用于动态需要高精度位置的领域。载波相位差分有整周模糊度的问题(伪距差分也有,需要伪距重构,但是比相位差分简单)。